- - Kairos-HomeWorld dirancang khusus untuk kecerdasan berwujud (embodied intelligence) dan merupakan kerangka unified pertama yang mampu menghasilkan lingkungan rumah yang lengkap dan sepenuhnya interaktif hanya dari satu teks prompt. Memperluas pembangkitan adegan dalam ruangan melampaui ruang individu, platform ini memungkinkan simulasi seluruh rumah di mana setiap objek dapat sepenuhnya dimanipulasi dalam mesin simulasi terintegrasi.
- - Kairos-HomeWorld menggunakan arsitektur hierarkis empat tahap yang mencakup pembangkitan denah lantai, konversi 2D ke 3D, penyempurnaan rekursif, dan penempatan objek yang dapat dimanipulasi. Pendekatan ini memungkilkan produksi adegan yang koheren secara global, akurat secara fisik, dan siap simulasi. Setiap lingkungan berisi lebih dari 15 objek yang dapat dimanipulasi dan mencapai Footprint Object Density (FOD) sebesar 4,16, yang merupakan nilai tertinggi di antara metode-metode yang dibandingkan.
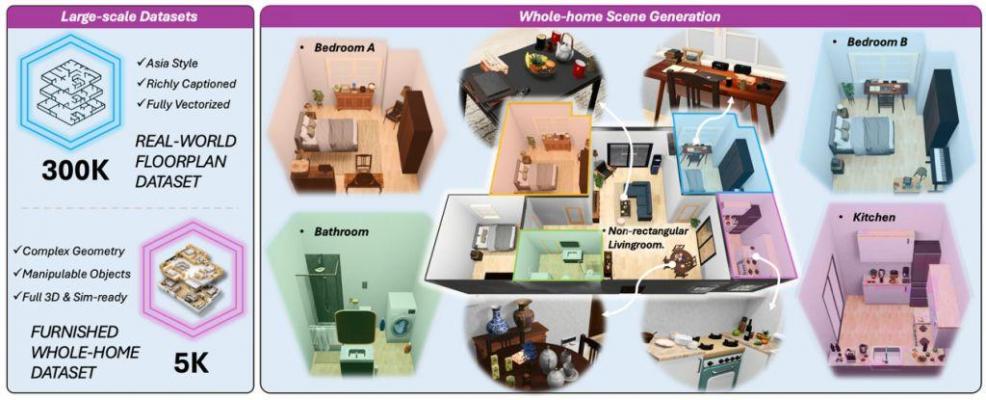
- - Dataset sumber terbuka yang menyertainya dirancang khusus untuk rumah tangga Tiongkok, memasangkan 300.000 denah lantai residensial nyata dengan 5.000 rumah berperabot lengkap yang siap simulasi dan 50.000 aset objek interaktif dengan kemampuan fisika. Telah digunakan dalam pelatihan robot harian ACE ROBOTICS, dataset ini secara signifikan mempercepat siklus transfer dari simulasi ke dunia nyata.
SHANGHAI, TIONGKOK – Media OutReach Newswire – 5 Juni 2026 – ACE ROBOTICS, berkolaborasi dengan Laboratorium Multimedia di Universitas Tiongkok Hong Kong (CUHK) dan Shenzhen Loop Area Institute, hari ini mengumumkan perilisan sumber terbuka Kairos-HomeWorld, kerangka World Model unified pertama di industri yang mampu menghasilkan lingkungan 3D interaktif skala penuh rumah, pada tingkat objek, hanya dari satu teks prompt. Solusi ini mengatasi keterbatasan lama dalam pembangkitan adegan dalam ruangan yang biasanya terbatas pada keluaran ruang tunggal dengan konsistensi global yang lemah dan interaktivitas terbatas. Kairos-HomeWorld mengatasi keterbatasan ini dengan menghasilkan lingkungan residensial yang koheren secara struktural, masuk akal secara fisik, dan fungsional lengkap. Simulasi berfidelitas tinggi dan berskala besar ini menyediakan fondasi yang kokoh untuk memajukan aplikasi kecerdasan berwujud dan mempercepat pelatihan robot di dunia nyata.
Visi jangka panjang untuk kecerdasan berwujud adalah lingkungan rumah. Namun, lingkungan perumahan pada dasarnya beragam dan sangat personal, mengharuskan robot untuk dilatih di berbagai macam skenario realistis dan terdiferensiasi sebelum mereka dapat beroperasi secara andal di satu rumah pun. Simulasi berfidelitas tinggi menawarkan jalur paling praktis untuk mencapai hal ini dalam skala besar, namun pendekatan yang ada biasanya melibatkan pertukaran: lingkungan sintetis kurang realistis, sementara adegan dunia nyata hasil pemindaian menawarkan interaktivitas terbatas. Kairos-HomeWorld, bersama dengan dataset yang menyertainya, dirancang untuk menjembatani kesenjangan ini, menghadirkan lingkungan yang realistis sekaligus interaktif dalam satu kerangka unified.
Arsitektur empat tahap untuk pembangkitan seluruh rumah pada tingkat objek
Pendekatan konvensional untuk pembangkitan adegan dalam ruangan masih terbatas pada keluaran ruang tunggal, sering kali menunjukkan konsistensi global yang lemah, ketidakakuratan fisik yang sering terjadi, dan interaktivitas yang terbatas atau tidak ada sama sekali. Kairos-HomeWorld mengambil pendekatan yang fundamental berbeda. Ia menguraikan pembangkitan seluruh rumah menjadi proses empat tahap yang terstruktur, mendefinisikan ulang paradigma arsitektur yang mendasarinya dari awal.
Tahap 1 — Pembangkitan Denah Lantai. Pendekatan berbasis pohon K-D menerjemahkan denah lantai dunia nyata menjadi representasi teks hierarkis yang dapat diproses secara efisien oleh model bahasa besar (LLM). Metode ini mengurangi masalah umum dalam pembangkitan tata letak konvensional, termasuk tumpang tindih ruang dan topologi yang terfragmentasi, menghasilkan konfigurasi spasial yang lebih koheren dan konsisten secara struktural.
Tahap 2 — Konversi 2D ke 3D & Pembangkitan Tata Letak Furnitur. Pendekatan “inisialisasi global top-down yang dikombinasikan dengan penelusuran detail sudut pandang orang pertama” menjangkar proses pada cangkang bangunan 3D yang dihasilkan pada Tahap 1. Metodologi ini mengurangi pergeseran geometris yang umumnya terkait dengan teknik konversi 2D ke 3D konvensional, memungkinkan pembangkitan adegan yang lebih stabil dan konsisten secara spasial.
Tahap 3 — Penyempurnaan Rekursif. Model bahasa-vision yang disesuaikan melakukan validasi dan koreksi iteratif, secara otomatis mengidentifikasi dan menyelesaikan inkonsistensi fisik, seperti pintu yang terhalang atau tabrakan objek. Proses rekursif ini secara material mengurangi kesalahan spasial, mencapai salah satu tingkat tabrakan furnitur terendah yang dilaporkan di industri.
Tahap 4 — Penempatan Objek yang Dapat Dimanipulasi. Algoritme penempatan yang berpusat pada permukaan memberikan setiap objek properti fisik yang terperinci, termasuk komposisi material, densitas, gesekan, dan hubungan dukungan struktural. Setiap adegan yang dihasilkan menggabungkan rata-rata lebih dari 15 objek yang dapat dimanipulasi dan mencapai Footprint Object Density (FOD) sebesar 4,16, sebuah metrik yang mencerminkan konsentrasi barang di berbagai permukaan furnitur. Semua objek kompatibel secara native dengan mesin simulasi, memungkinkan interaksi langsung untuk tugas-tugas seperti menggenggam, memindahkan, dan menumpuk.
Lingkungan yang dihasilkan melampaui keluaran “dapat dilihat tetapi tidak dapat ditindaklanjuti”. Struktur spasialnya yang koheren memungkinkan navigasi berkelanjutan yang mulus di seluruh ruangan, sementara objek yang dilengkapi dengan properti fisik realistis memungkinkan robot untuk menyimulasikan tugas-tugas rumah tangga yang kompleks secara menyeluruh (end-to-end). Secara keseluruhan, pendekatan ini mengatasi keterbatasan utama dalam pipeline data yang ada, mengatasi kelangkaan data simulasi 3D berkualitas tinggi, kurangnya realisme dalam lingkungan sintetis, dan interaktivitas terbatas dari adegan hasil pemindaian, semuanya dalam satu kerangka unified.
Dataset: 300.000 denah lantai nyata, 5.000 rumah sepenuhnya interaktif, dibangun untuk rumah tangga Tiongkok
ACE ROBOTICS dan CUHK membuka sumber data untuk dataset yang berisi 300.000 denah lantai residensial dengan anotasi struktural, yang bersumber dari daftar properti dunia nyata dan diproses melalui pipeline otomatis multi-tahap. Pipeline tersebut melakukan vektorisasi dan memberi label pada elemen spasial kunci, termasuk posisi pintu dan jendela, geometri ruangan, zonasi fungsional, dan konektivitas. Sebagai perbandingan, tolok ukur yang banyak digunakan seperti RPLAN dan ResPlan masing-masing berisi sekitar 80.000 dan 17.000 denah lantai, yang menggarisbawahi skala dan komprehensivitas dataset Kairos-HomeWorld.
Dibangun di atas fondasi ini, dataset juga mencakup 5.000 lingkungan residensial yang dilengkapi furnitur lengkap, masing-masing menampilkan tata letak furnitur yang utuh dan rata-rata lebih dari 15 objek berkemampuan fisika yang dapat dimanipulasi, didukung oleh model PhysX-Omni. Semua aset siap simulasi dan dapat langsung diimpor ke dalam mesin simulasi, memungkinkan penggunaan segera dalam skenario pelatihan interaktif.
Sebagian besar dataset adegan dalam ruangan terbuka yang ada berpusat pada format perumahan Amerika Utara dan Eropa, biasanya menampilkan dapur dengan konsep terbuka, tidak adanya balkon layanan, serta tata letak dan elemen desain yang hanya menangkap sebagian kecil dari perumahan global. Akibatnya, robot yang dilatih pada dataset ini sering menunjukkan kemampuan transfer yang terbatas ketika digunakan di lingkungan di luar cakupan tersebut. Dataset Kairos-HomeWorld dirancang khusus untuk rumah tangga Tiongkok, dengan cakupan yang disengaja terhadap tipologi perumahan yang secara historis kurang terwakili. Dataset ini mencakup berbagai ukuran unit, dari apartemen studio seluas sekitar 30 m² hingga residensi seluas lebih dari 200 m². Dataset ini secara akurat mencerminkan fitur arsitektur kunci yang umum ditemukan di lingkungan ini, termasuk tata letak ventilasi silang utara-selatan, dapur tertutup, balkon layanan khusus, kamar mandi dengan pemisahan area basah dan kering, serta ruang penyimpanan di pintu masuk, juga konfigurasi ruangan tidak beraturan yang sering ditemukan di rumah-rumah tua.
Dataset ini dirilis secara terbuka untuk komunitas akademik dan industri. Ke depan, tim berencana untuk memperluas cakupannya ke wilayah lain, gaya interior, dan skenario interaksi tambahan, semakin menurunkan hambatan menuju pelatihan yang siap pakai di dunia nyata untuk kecerdasan berwujud.
Lihat aksinya: dari satu prompt ke rumah yang sepenuhnya interaktif
Kairos-HomeWorld menjalankan pipeline menyeluruh (end-to-end), dari input teks awal hingga lingkungan rumah yang sepenuhnya interaktif, memberikan konsistensi spasial global, realisme fisik, dan interaktivitas mulus dari satu prompt.
Sistem dimulai dengan satu baris prompt: “Hasilkan apartemen dua kamar tidur seluas 90 m² dalam gaya neo-Tiongkok.” Memanfaatkan data denah lantai nyata dan representasi pohon K-D-nya, Kairos-HomeWorld pertama-tama membangun tata letak spasial kosong yang selaras dengan pola kehidupan nyata, menggabungkan ventilasi silang dan zonasi fungsional yang terdefinisi dengan baik. Dibangun di atas fondasi ini, pendekatan hierarkis “tata letak global plus detail sudut pandang orang pertama” melengkapi lingkungan dengan koherensi gaya, sementara proses rendering PhysX-Omni memberikan properti fisik lengkap ke semua permukaan dan objek, termasuk perilaku artikulasi, memastikan adegan sepenuhnya interaktif dan siap simulasi.
Instruksi bahasa alami tunggal, “bereskan seluruh rumah”, diuraikan oleh robot menjadi berbagai subtugas diskrit, yang dieksekusi secara berurutan di sepanjang jalur navigasi lengkap yang melintasi ruang tamu, kamar tidur, dapur, kamar mandi, dan ruang makan. Robot mengenali objek, merencanakan rute yang efisien, dan melakukan tugas manipulasi yang presisi, termasuk interaksi objek artikulasi untuk membuka pintu kulkas dan lemari, interaksi fluida untuk menuangkan deterjen cair, interaksi benda lunak untuk menarik tirai, interaksi objek tidak beraturan untuk mengambil apel, dan interaksi fisik berbasis gravitasi untuk meletakkan camilan.
Lingkungan simulasi konvensional biasanya mendukung pelatihan yang berfokus pada navigasi secara terpisah. Sebaliknya, Kairos-HomeWorld mengintegrasikan struktur spasial yang konsisten secara global dengan objek yang mewujudkan properti fisik realistis. Ini memungkinkan robot untuk berinteraksi secara alami dengan lebih dari 15 jenis objek, secara akurat memodelkan dinamika dunia nyata seperti tabrakan, gravitasi, dan gesekan, serta untuk melakukan latihan menyeluruh dari tugas-tugas rumah tangga yang kompleks sepenuhnya dalam lingkungan virtual.
Di seluruh industri, hambatan struktural yang sama, yaitu kelangkaan data pelatihan skala rumah, sedang diatasi melalui berbagai pendekatan. Sebagai contoh, kolaborasi Figure AI dengan Brookfield berfokus pada pengumpulan data aktivitas manusia di lebih dari 100.000 unit hunian. Kairos-HomeWorld mengatasi tantangan ini melalui pembangkitan sintetis sesuai permintaan (on-demand), memberikan lingkungan pelatihan yang terukur yang ditingkatkan dengan realisme fisik tingkat objek, kemampuan yang tidak dapat sepenuhnya diberikan oleh pengumpulan data dunia nyata saja.
Sebaliknya, Kairos-HomeWorld memberikan biaya yang jauh lebih rendah dan efisiensi yang lebih tinggi untuk pelatihan robot rumah tangga. Didukung oleh world model-nya, ia dapat secara terprogram menghasilkan beragam adegan simulasi rumah Tiongkok dan objek interaktif berkemampuan fisika dalam skala besar.
Robot dapat menyelesaikan berbagai tugas rumah tangga dengan pelatihan sepenuhnya dalam lingkungan virtual. Pembangkitan adegan baru memerlukan biaya marjinal mendekati nol, menghilangkan pengeluaran pengujian dunia nyata yang substansial seperti operasi dan pemeliharaan lokasi serta kerusakan furnitur. Sementara itu, tanpa kendala oleh keterbatasan stok properti residensial fisik, ia mengungguli pendekatan pengumpulan data dunia nyata dalam hal efisiensi pelatihan dan perluasan skala.
Kairos-HomeWorld telah digunakan dalam alur kerja pelatihan kecerdasan berwujud ACE ROBOTICS, memungkinkan simulasi pipeline penuh dari tugas-tugas rumah tangga berhorizon panjang, termasuk navigasi antar ruangan dan merapikan banyak ruangan. Dengan memungkinkan robot untuk melakukan latihan urutan tugas lengkap dalam lingkungan virtual, platform ini secara signifikan memperpendek siklus transfer dari simulasi ke dunia nyata. Pendekatan ini menurunkan hambatan untuk mengembangkan sistem kecerdasan berwujud dan mendukung akselerasi serta penerapan robotika rumah tangga skala besar, terutama di pasar Tiongkok. Kairos-HomeWorld sekarang tersedia di GitHub.
Tentang ACE ROBOTICS
Membekali robot dengan “otak” cerdas dan “jiwa” yang menarik.
ACE ROBOTICS adalah perusahaan robotika pionir yang berdedikasi untuk memajukan bidang kecerdasan berwujud (embodied intelligence). Melalui terobosan inovasi teknologi dan wawasan mendalam tentang skenario kecerdasan berwujud, kami bertujuan memberdayakan robot dengan kemampuan untuk secara otonom memahami dan menjelajahi dunia fisik, sehingga mempercepat implementasi komersial mereka.
Perusahaan ini memelopori paradigma R&D ACE dan membangun rantai teknologi berbasis visi yang terdiri dari “mesin data lingkungan, kognisi dunia nyata, generalisasi interaksi berwujud”. Menggunakan penangkapan lingkungan spatiotemporal penuh dan multi-perspektif sebagai mesinnya, bersama dengan Kairos 3.0 – world model sumber terbuka pertama di Tiongkok yang dapat diaplikasikan secara komersial – serta Embodied Foundation Model sebagai tulang punggung teknisnya, ACE ROBOTICS mengatasi tantangan industri inti seperti kelangkaan data, kesenjangan akal sehat, generalisasi yang buruk, dan keterbatasan keserbagunaan. Secara bersamaan, perusahaan meluncurkan modul unggulannya, A1 Embodied Super Brain Module, yang mempercepat penerapan komersial skala besar kecerdasan berwujud di berbagai skenario.
ACE ROBOTICS adalah pelopor teknologi sekaligus pembangun ekosistem. Melalui kerja sama strategis dengan produsen perangkat keras terkemuka, penyedia layanan cloud, dan mitra skenario vertikal, kami telah menerobos kebuntuan industri “model-perangkat keras-skenario”, menyediakan solusi standar dan khusus yang mendorong perkembangan industri kecerdasan berwujud di Tiongkok.