Menu Website

- Home
- MediaOutReach
- ACE ROBOTICS' Kairos World Model Leads Multiple Global Embodied-Intelligence Benchmarks

ACE ROBOTICS' Kairos World Model Leads Multiple Global Embodied-Intelligence Benchmarks
Senin, 15 Juni 2026 | 20:16
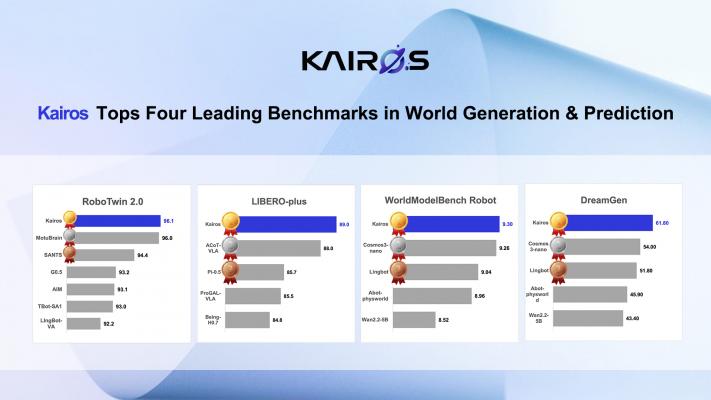
Tops Four Leading Benchmarks in World Generation & Prediction
SHANGHAI, CHINA -
Media OutReach Newswire
- 15 June 2026 - ACE ROBOTICS today announced that its open-source
Kairos world model has achieved leading results across four global
embodied-intelligence benchmarks: RoboTwin 2.0, LIBERO-Plus,
WorldModelBench Robot and DreamGen. Kairos ranked first among evaluated
world models and vision-language-action (VLA) systems on these
benchmarks' public leaderboards as of 12 June 2026, leading across the
core capabilities of embodied intelligence, including complex robotic
manipulation, scene-level generalization, physical-world modeling and
zero-shot transfer. The project is openly available on GitHub, Hugging
Face and ModelScope, giving researchers and developers a public
reference point for the model, benchmark results and technical
materials.
Embodied intelligence faces a fundamental challenge: generalization. A robot must operate reliably in environments it has never seen, adapting to new lighting, layouts, objects, embodiments and noisy real-world conditions. While VLA models have become a prevailing approach by directly mapping perception and language inputs to robot actions, ACE ROBOTICS believes world models offer a more scalable path by explicitly learning the underlying dynamics of the physical world and predicting how environments evolve. Kairos is designed to validate that approach.
Leading scene-level generalization on LIBERO-Plus
One of Kairos' most significant results comes from LIBERO-Plus, a scene-level generalization benchmark proposed by the Shanghai Innovation Institute with Fudan University, Tongji University and the National University of Singapore. It evaluates robustness under seven real-world variables: camera angle, robot embodiment, language instruction, lighting, background, sensor noise and spatial layout.
Kairos achieved an overall score of 89.0, ranking first among all evaluated world models and VLA systems. It surpassed leading VLA models including ACoT-VLA (88.0), Pi 0.5 (85.7) and ProGAL-VLA (85.5), as well as the Being-H0.7 world model (84.8). It also showed strong environmental robustness, with near-ceiling performance on lighting (97.7), noise (96.8) and background (95.8), and ranked highly on camera angle and language instruction.
According to ACE ROBOTICS, this marks the first time a world-model approach has outperformed leading VLA systems on LIBERO-Plus for scene-level generalization, pointing to a path where robots adapt to homes, factories, retail spaces and other environments with far less environment-specific retraining.
A compact model with strong physical modeling efficiency
On WorldModelBench Robot, a physical-modeling benchmark proposed by researchers from UC Berkeley, UC San Diego, NVIDIA and MIT, Kairos-4B achieved an overall score of 9.30, ranking first on the benchmark. With only 4 billion parameters, it outperformed larger systems including 28-billion-parameter Lingbot, 16-billion-parameter Cosmos 3, 14-billion-parameter Abot-PhysWorld and 5-billion-parameter Wan 2.2, setting a new record for parameter efficiency in embodied world models.
Kairos matched the top instruction-following score (2.36) of the 16-billion-parameter Cosmos 3 with about one quarter of the parameters, a fourfold efficiency gain. It scored 4.96 on physics adherence, with perfect marks on Newtonian mechanics and gravity, and a perfect score on temporal quality, reflecting strong temporal consistency and visual continuity over long horizons.
A unified architecture, not a modular pipeline
ACE ROBOTICS attributes Kairos' performance to its native unified "multi-modal understanding-generation-prediction" architecture. Unlike modular approaches that stitch together separate components for world understanding, generation and prediction, Kairos integrates these within a single backbone that shares one global world state, reducing the information loss and coordination latency between modules for more consistent physical modeling, stronger long-horizon prediction and more reliable action planning.
ACE ROBOTICS first introduced this architecture in December 2025, and the broader industry is now converging on a similar path: NVIDIA's Cosmos 3.0, introduced in 2026, adopts a comparable single-system design that brings vision reasoning, world generation and action prediction into one architecture. Built on this foundation, Kairos-4B is, in ACE ROBOTICS' description, the first embodied world model able to drive a physical robot directly on-device, closing the perception-to-action loop without intermediate translation latency.
Leading on synthetic data transfer and complex robot manipulation
Kairos also ranked first on DreamGen Bench, a benchmark led by NVIDIA with the University of Washington, UC Berkeley and UCLA that measures how well synthetic data generated by world models transfers to unseen objects, behaviors and environments, a key predictor of downstream robot-training value. Kairos ranked first on both average physics adherence (AVG_PA 0.538) and overall average score (AVG_Score 0.618), and led globally on new-behavior execution and new-environment adaptation.
On RoboTwin 2.0, a demanding dual-arm manipulation benchmark proposed by Shanghai Jiao Tong University and the University of Hong Kong with Shanghai AI Laboratory, Kairos scored 96.1% — a state-of-the-art result on the benchmark's public leaderboard as of 12 June 2026. Across the benchmark's 50 complex two-arm tasks it scored 96.9% in clean scenarios and 95.2% in randomized scenarios, ahead of VLA models such as G0.5 (93.2) and starVLA (88.3) and world models including AIM (93.1), Fast-WAM (91.8) and MotuBrain (96.0).
From benchmark leadership to commercial deployment
Together, these results validate Kairos' technical direction across the core dimensions of embodied intelligence, from physical-rule understanding and zero-shot generalization to environmental robustness and fine-grained dual-arm manipulation, supporting ACE ROBOTICS' aim to move robots beyond task imitation toward physical-world understanding, long-horizon reasoning and real-world execution.
The results come as ACE ROBOTICS accelerates commercialization. The company says it has raised several hundred million U.S. dollars across financing rounds in the first half of 2026, including a recent Angel+ round backed by investors such as Dachen Caizhi, Shenzhen Capital Group and the Shanghai Sci-Tech Innovation Fund, with existing shareholder SenseTime's Guoxiang Capital increasing its stake. The proceeds will support continued world-model research and integrated hardware-software solutions for sectors including smart retail, security and inspection, tourism and hospitality.
"Embodied intelligence is the next era of AI, and a world model is the key to unlocking it," said Wang Xiaogang, Chairman of ACE ROBOTICS. "Our mission is to give every robot a capable brain."
Kairos is openly available on GitHub, Hugging Face and ModelScope:
https://github.com/kairos-agi/kairos-sensenova
https://huggingface.co/kairos-agi
https://modelscope.cn/collections/kairos-team/kairos30
 https://www.linkedin.com/company/acerobotics/posts/'feedView=all&viewAsMember=true%EF%BD%9C
https://www.linkedin.com/company/acerobotics/posts/'feedView=all&viewAsMember=true%EF%BD%9C
 https://x.com/ace_robotics
https://x.com/ace_robotics
Embodied intelligence faces a fundamental challenge: generalization. A robot must operate reliably in environments it has never seen, adapting to new lighting, layouts, objects, embodiments and noisy real-world conditions. While VLA models have become a prevailing approach by directly mapping perception and language inputs to robot actions, ACE ROBOTICS believes world models offer a more scalable path by explicitly learning the underlying dynamics of the physical world and predicting how environments evolve. Kairos is designed to validate that approach.
Leading scene-level generalization on LIBERO-Plus
One of Kairos' most significant results comes from LIBERO-Plus, a scene-level generalization benchmark proposed by the Shanghai Innovation Institute with Fudan University, Tongji University and the National University of Singapore. It evaluates robustness under seven real-world variables: camera angle, robot embodiment, language instruction, lighting, background, sensor noise and spatial layout.
Kairos achieved an overall score of 89.0, ranking first among all evaluated world models and VLA systems. It surpassed leading VLA models including ACoT-VLA (88.0), Pi 0.5 (85.7) and ProGAL-VLA (85.5), as well as the Being-H0.7 world model (84.8). It also showed strong environmental robustness, with near-ceiling performance on lighting (97.7), noise (96.8) and background (95.8), and ranked highly on camera angle and language instruction.
According to ACE ROBOTICS, this marks the first time a world-model approach has outperformed leading VLA systems on LIBERO-Plus for scene-level generalization, pointing to a path where robots adapt to homes, factories, retail spaces and other environments with far less environment-specific retraining.
A compact model with strong physical modeling efficiency
On WorldModelBench Robot, a physical-modeling benchmark proposed by researchers from UC Berkeley, UC San Diego, NVIDIA and MIT, Kairos-4B achieved an overall score of 9.30, ranking first on the benchmark. With only 4 billion parameters, it outperformed larger systems including 28-billion-parameter Lingbot, 16-billion-parameter Cosmos 3, 14-billion-parameter Abot-PhysWorld and 5-billion-parameter Wan 2.2, setting a new record for parameter efficiency in embodied world models.
Kairos matched the top instruction-following score (2.36) of the 16-billion-parameter Cosmos 3 with about one quarter of the parameters, a fourfold efficiency gain. It scored 4.96 on physics adherence, with perfect marks on Newtonian mechanics and gravity, and a perfect score on temporal quality, reflecting strong temporal consistency and visual continuity over long horizons.
A unified architecture, not a modular pipeline
ACE ROBOTICS attributes Kairos' performance to its native unified "multi-modal understanding-generation-prediction" architecture. Unlike modular approaches that stitch together separate components for world understanding, generation and prediction, Kairos integrates these within a single backbone that shares one global world state, reducing the information loss and coordination latency between modules for more consistent physical modeling, stronger long-horizon prediction and more reliable action planning.
ACE ROBOTICS first introduced this architecture in December 2025, and the broader industry is now converging on a similar path: NVIDIA's Cosmos 3.0, introduced in 2026, adopts a comparable single-system design that brings vision reasoning, world generation and action prediction into one architecture. Built on this foundation, Kairos-4B is, in ACE ROBOTICS' description, the first embodied world model able to drive a physical robot directly on-device, closing the perception-to-action loop without intermediate translation latency.
Leading on synthetic data transfer and complex robot manipulation
Kairos also ranked first on DreamGen Bench, a benchmark led by NVIDIA with the University of Washington, UC Berkeley and UCLA that measures how well synthetic data generated by world models transfers to unseen objects, behaviors and environments, a key predictor of downstream robot-training value. Kairos ranked first on both average physics adherence (AVG_PA 0.538) and overall average score (AVG_Score 0.618), and led globally on new-behavior execution and new-environment adaptation.
On RoboTwin 2.0, a demanding dual-arm manipulation benchmark proposed by Shanghai Jiao Tong University and the University of Hong Kong with Shanghai AI Laboratory, Kairos scored 96.1% — a state-of-the-art result on the benchmark's public leaderboard as of 12 June 2026. Across the benchmark's 50 complex two-arm tasks it scored 96.9% in clean scenarios and 95.2% in randomized scenarios, ahead of VLA models such as G0.5 (93.2) and starVLA (88.3) and world models including AIM (93.1), Fast-WAM (91.8) and MotuBrain (96.0).
From benchmark leadership to commercial deployment
Together, these results validate Kairos' technical direction across the core dimensions of embodied intelligence, from physical-rule understanding and zero-shot generalization to environmental robustness and fine-grained dual-arm manipulation, supporting ACE ROBOTICS' aim to move robots beyond task imitation toward physical-world understanding, long-horizon reasoning and real-world execution.
The results come as ACE ROBOTICS accelerates commercialization. The company says it has raised several hundred million U.S. dollars across financing rounds in the first half of 2026, including a recent Angel+ round backed by investors such as Dachen Caizhi, Shenzhen Capital Group and the Shanghai Sci-Tech Innovation Fund, with existing shareholder SenseTime's Guoxiang Capital increasing its stake. The proceeds will support continued world-model research and integrated hardware-software solutions for sectors including smart retail, security and inspection, tourism and hospitality.
"Embodied intelligence is the next era of AI, and a world model is the key to unlocking it," said Wang Xiaogang, Chairman of ACE ROBOTICS. "Our mission is to give every robot a capable brain."
Kairos is openly available on GitHub, Hugging Face and ModelScope:
https://github.com/kairos-agi/kairos-sensenova
https://huggingface.co/kairos-agi
https://modelscope.cn/collections/kairos-team/kairos30
BERITA LAINNYA

Senin, 15 Juni 2026 | 20:27

Senin, 15 Juni 2026 | 20:26

Senin, 15 Juni 2026 | 20:25

Senin, 15 Juni 2026 | 20:24

Senin, 15 Juni 2026 | 20:23

Senin, 15 Juni 2026 | 20:22


Senin, 15 Juni 2026 | 20:19


Senin, 15 Juni 2026 | 20:18

Senin, 15 Juni 2026 | 20:17

Senin, 15 Juni 2026 | 20:17

BERIKAN KOMENTAR

-
Senin, 15 Juni 2026 | 20:27
First Phosphate Closes Oversubscribed Private Placement to Existing and Follow-on Investors
-
Senin, 15 Juni 2026 | 20:26
V3D Asia and Nuvah Partner With SIRIM Academy to Drive Malaysia's 3D Printed Construction Future
-
Senin, 15 Juni 2026 | 20:25
RZOLV Technologies Showcases Non-Cyanide Gold Recovery Platform at Mining Innovation on the Hill in Ottawa
-
Senin, 15 Juni 2026 | 20:24
Embracing Summer Effortlessly: Garvee Unveils All-Scenario Collection for the Modern Family
-
-
Senin, 15 Juni 2026 | 20:22
Focus Graphite Completes Final Major ESIA Technical Study, Advancing Lac Knife Toward Permitting

-

-
 Sabtu, 13 Juni 2026 | 18:08
Sabtu, 13 Juni 2026 | 18:08
Shopee Hyper Brand Day: Nikmati Diskon Hingga 70% untuk Penawaran TTRacing dan PRISM+ di Musim Piala Dunia Ini
-
 Rabu, 10 Juni 2026 | 21:10
Rabu, 10 Juni 2026 | 21:10
Wali Kota Dumai Turun Langsung Temui Massa, Aksi Buruh TKBM Berakhir Kondusif
-
 Sabtu, 13 Juni 2026 | 18:07
Sabtu, 13 Juni 2026 | 18:07
TVBS Terapkan Penerjemahan Berbasis AI untuk Pidato Utama NVIDIA GTC Taipei
-
 Sabtu, 13 Juni 2026 | 18:10
Sabtu, 13 Juni 2026 | 18:10
Anggota 1win VIP Community Ilia Topuria Siap Tampil di Laga Utama Bersejarah UFC Freedom 250
-
 Sabtu, 13 Juni 2026 | 18:06
Sabtu, 13 Juni 2026 | 18:06
Kualitas Baru, Masa Depan Bersama – Beijing CBD Mengundang Dunia untuk Menjalin Kerja Sama





